Autonomous Vehicle Platform
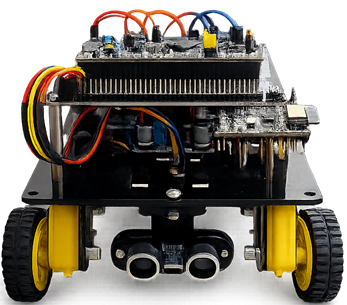
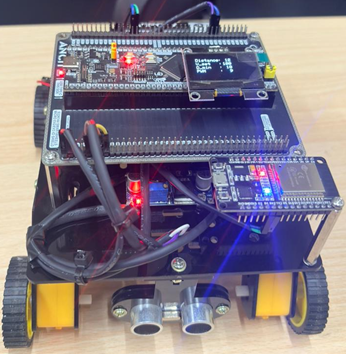
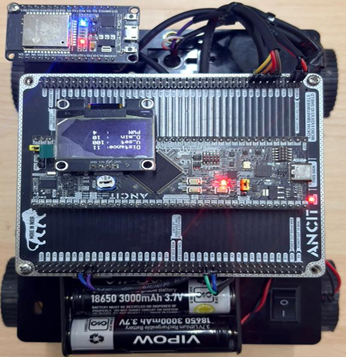
ANCIT Smart Rover Kit
A compact autonomous vehicle development platform powered by the ANCIT SmartWheels EV3 Board with ESP32, designed to demonstrate next-generation mobility and embedded automotive technologies.
Key Capabilities
- Adaptive Cruise Control (ACC) & Emergency Braking (AEB)
- FOTA – Firmware Over-The-Air with CI/CD pipeline
- GenX Code Generator – MATLAB, Sensor & CAN config
- AUTOSAR Legacy & Lightweight firmware support
ACC
Cruise Control
AEB
Emergency Braking
FOTA
OTA Updates
SDV
Software Defined